This project proposes a novel approach to cholesteatoma surgery. It investigated a mechatronics solution to satisfy the clinical needs for eliminating the residual and recurrent cholesteatoma (lesion cells that attack the middle ear). It combining robotics, automatic control and mechatronics design to reach the tiny space of the middle ear cavity and perform a complex surgical task.
I participated in this project as a research assistant (PhD student). This thesis was financed by a ministerial scholarship, based on a Franco-Swiss collaboration, which was obtained following a competitive call for projects within the UBFC. This collaboration between CHU Besançon, ARTORG center (Swiss collaborator) and FEMTO-ST had the objective to develop a micro-robotic system dedicated to cholesteatoma surgery. This pathology can potentially lead to serious complications (e.g., deafness or facial paralysis) in the absence of treatment. The objective of this robotic system is to i) improve the surgeon's performance during the operation, ii) reduce the recovery time of the patient following the procedure, and iii) avoid future interventions in case of residual cells.
The thesis work is mainly divided into two parts:
- The first part is devoted to the analysis of the clinical need for such a surgical intervention by defining the necessary specifications for the implementation of an efficient and safe micro-robotic system that contributes to better cholesteatoma surgery [1].
- The second part concerns the development of an image-guided micro-robotic system [2]. The main contributions of this part are :
- modeling the movement of a rigid surgical tool (straight [3] or curved [4]) according to the anatomical context of the middle ear;
- synthesis of the control laws so that the robot can follow a resection/ablation path [5], [6] predefined by the surgeon while respecting the given anatomical constraints [7], [8], [9] (insertion point, presence of anatomical structure to be avoided, etc.);
- implementation of a simulator to ensure the correct operation of the proposed controllers (see Fig. 1) ;
- the controller is a C++ software (server) which communicates with a client (either simulator or real robot) using the TCP/IP protocol;
- realization of an experimental platform using a parallel robot available at FEMTO-ST to test the proposed controllers;
- experimental tests to evaluate controllers in a clinical environment with a serial robot at ARTORG center;
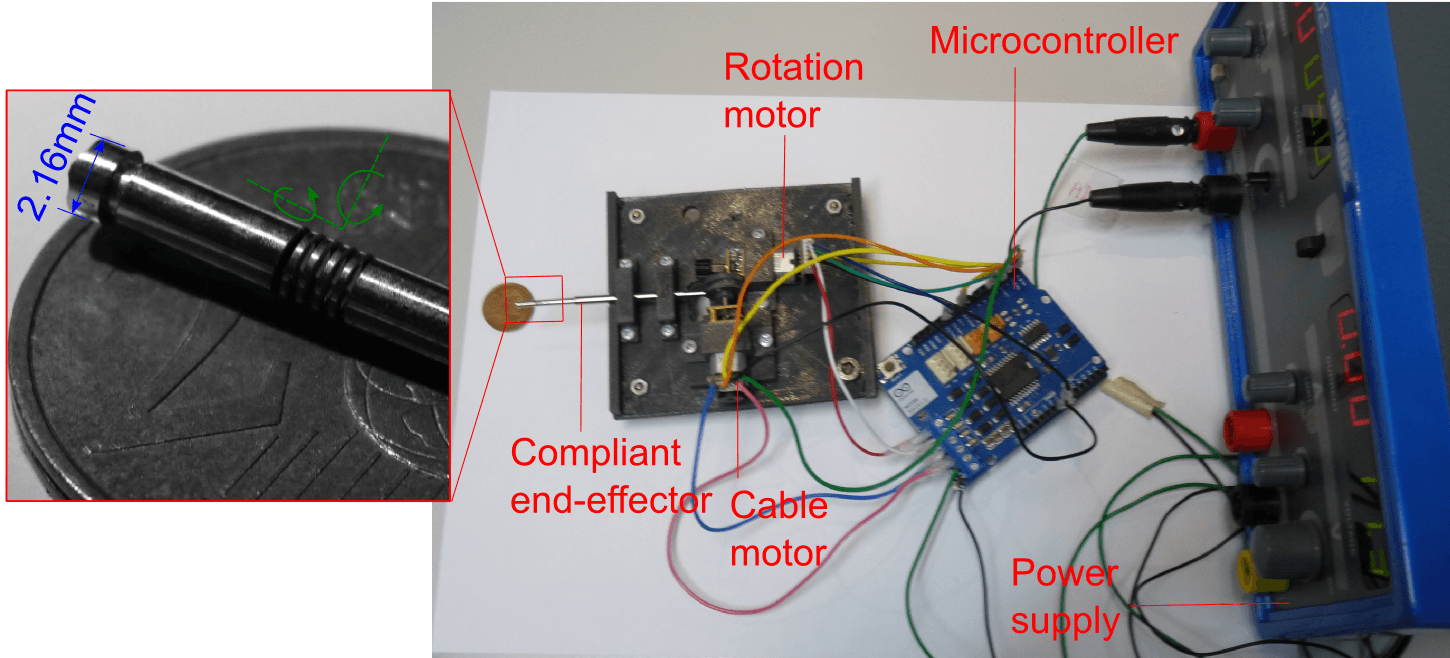
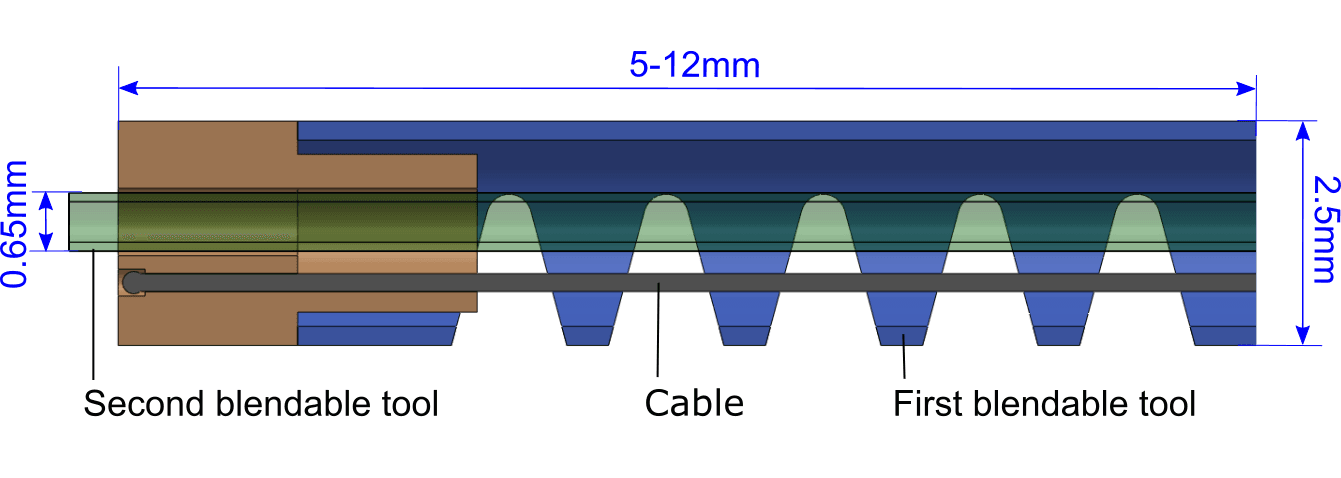
- design of a flexible and actuated micro-tool [1] to scan the suspect area (Fig. 2);
- scientific communications (written and oral) in international journals and conferences.
The promising results obtained during this thesis were used to set up the ANR PRC project μRoCS (Micro-Robotic Cholesteatoma Surgery) [2018 - 2021] to further develop the robotic system.
References
-
[1]B. Dahroug, B. Tamadazte, S. Weber, L. Tavernier, and N. Andreff, “Review on otological robotic systems: toward microrobot-assisted cholesteatoma surgery,” IEEE Reviews in Biomedical Engineering (RBME), vol. 11, pp. 125–142, 2018.
-
[2]B. Dahroug, “Micro-Robotic Cholesteatoma Surgery: clinical requirements analysis and image-based control under constraints,” PhD thesis, Bourgogne Franche-Comté, 2018.
-
[3]B. Dahroug, B. Tamadazte, and N. Andreff, “3D Path Following with Remote Center of Motion Constraints,” in International Conference on Informatics in Control, Automation and Robotics (ICINCO), Lisbon, Portugal, 2016, vol. 1, pp. 84–91.
-
[4]B. Dahroug, B. Tamadazte, and N. Andreff, “Unilaterally Constrained Motion of A Curved Surgical Tool,” Robotica, vol. under publication, pp. 1–23.
-
[5]B. Dahroug et al., “Some examples of path following in microrobotics ,” in International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Nagoya, Japan, 2018, vol. 8, pp. 1–6.
-
[6]B. Rosa et al., “Online robust endomicroscopy video mosaicking using robot prior,” IEEE Robotics and automation letters (RA-L), pp. 4163–4170, Aug. 2018.
-
[7]B. Dahroug, B. Tamadazte, P. Rougeot, and N. Andreff, “Robotic Guidance of a Surgical Tool Under Constrained Motions,” IEEE Transactions on Medical Robotics and Bionics, vol. 5, no. 3, pp. 645–656, 2023.
-
[8]B. Dahroug, B. Tamadazte, and N. Andreff, “Task Controller for Performing Remote Centre of Motion,” in Informatics in Control, Automation and Robotics. Lecture Notes in Electrical Engineering (LNEE), vol. 430, Springer, 2018, pp. 117–132.
-
[9]B. Dahroug, B. Tamadazte, and N. Andreff, “Visual servoing controller for time-invariant 3D path following with remote centre of motion constraint,” in IEEE International Conference on Robotics and Automation (ICRA), Singapore, Singapore, 2017, pp. 3612–3618.
Associates
- Stefan Weber (University Professor, Universität Bern, ARTORG Center, Bern, Swiss)
- Laurent Tavernier (University Professor - Hospital Practitioner, UBFC, CHRU, Besançon, France)
- Brahim Tamadazte (Senior Scientist, CNRS, Institut FEMTO-ST, Besançon, France)
- Nicolas Andreff (University Professor, UBFC, Institut FEMTO-ST, Besançon, France)